






Reducing the overheads for coupling machine learning models to Fortran
ML&DL Seminars, LSCE - IPSL, Paris
Jack Atkinson 
ICCS/Cambridge
Simon Clifford
ICCS/Cambridge
Elliott Kasoar
STFC/ICCS
Tom Meltzer
ICCS/Cambridge
Dominic Orchard
ICCS/Cambridge/Kent
2023-11-28
Precursors
Licensing
Except where otherwise noted, these presentation materials are licensed under the Creative Commons Attribution-NonCommercial 4.0 International (CC BY-NC 4.0) License.

Slides
To access links or follow on your own device these slides can be found at
https://jackatkinson.net/slides
The ICCS
The Institute of Computing for Climate Science
- Domain-specific group based at the University of Cambridge
- Embedded support to several international climate science projects

Climate Modelling
Climate models are large, complex, many-part systems.

Machine Learning
We typically think of Deep Learning as an end-to-end process;
a black box with an input and an output.
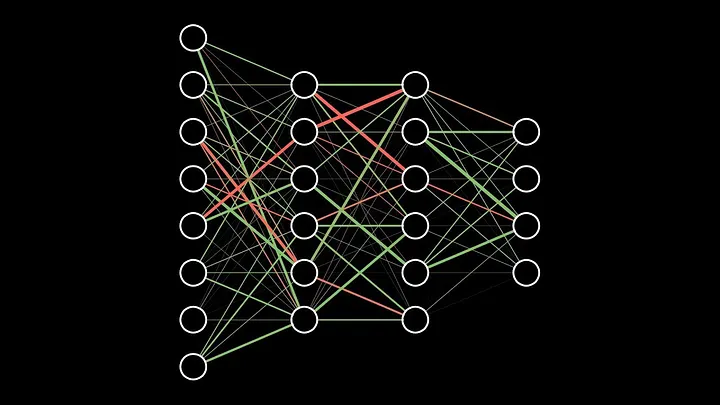
 Who’s that Pokémon?
Who’s that Pokémon?
\[\begin{bmatrix}\vdots\\a_{23}\\a_{24}\\a_{25}\\a_{26}\\a_{27}\\\vdots\\\end{bmatrix}=\begin{bmatrix}\vdots\\0\\0\\1\\0\\0\\\vdots\\\end{bmatrix}\] It’s Pikachu!
Neural Net by 3Blue1Brown under fair dealing.
Pikachu © The Pokemon Company, used under fair dealing.
Machine Learning in Science
Neural Net by 3Blue1Brown under fair dealing.
Pikachu © The Pokemon Company, used under fair dealing.
Language interoperation
Many large scientific models are written in Fortran (or C, or C++).
Much machine learning is conducted in Python.

![]()
![]()

![]()
![]()

![]()

Mathematical Bridge by cmglee used under CC BY-SA 3.0
PyTorch, the PyTorch logo and any related marks are trademarks of The Linux Foundation.”
TensorFlow, the TensorFlow logo and any related marks are trademarks of Google Inc.
Considerations
There are 2 types of efficiency:
Computational
![]()
![]()
![]()
![]()
Developer
![]()
![]()
![]()
![]()
An ideal solution should:
- not generate excess additional work,
- not require advanced computing skills,
- have a minimal learning curve,
- not add excess dependencies,
- be easy to maintain, and
- maximise performance.
Possible solutions
- Implement a NN in Fortran
- Forpy/CFFI
- SmartSim
- Fortran-Keras Bridge
- e.g.
inference-engine,neural-fortran, own custom solution etc.

- Removes the two-language problem

- How do you ensure you port the model correctly?
- ML libraries are highly optimised, probably more so than your code.
Possible solutions
- Implement a NN in Fortran
- Forpy/CFFI
- SmartSim
- Fortran-Keras Bridge
- Brings python types into Fortran
- Easy to add
forpy.modfile and compile
- Verbose, with a learning curve
- Need to manage and link python environment
- Increases dependencies
Possible solutions
- Implement a NN in Fortran
- Forpy/CFFI
- SmartSim
- Fortran-Keras Bridge
- Pass data between workers through a network glue layer
- May be necessary for certain architectures
- Highly versatile - deals with data, not endpoints.
- Learning curve
- Involves data copying
Possible solutions
- Implement a NN in Fortran
- Forpy/CFFI
- SmartSim
- Fortran-Keras Bridge
- Pure Fortran
- TensorFlow (Keras) only
- Inactive and incomplete
Other suggestions include fifo pipes, YAC (Arnold et al. 2023)
Possible solutions
![]()
![]()
![]()
![]()

![]()
Python
env
Python
runtime
![]()
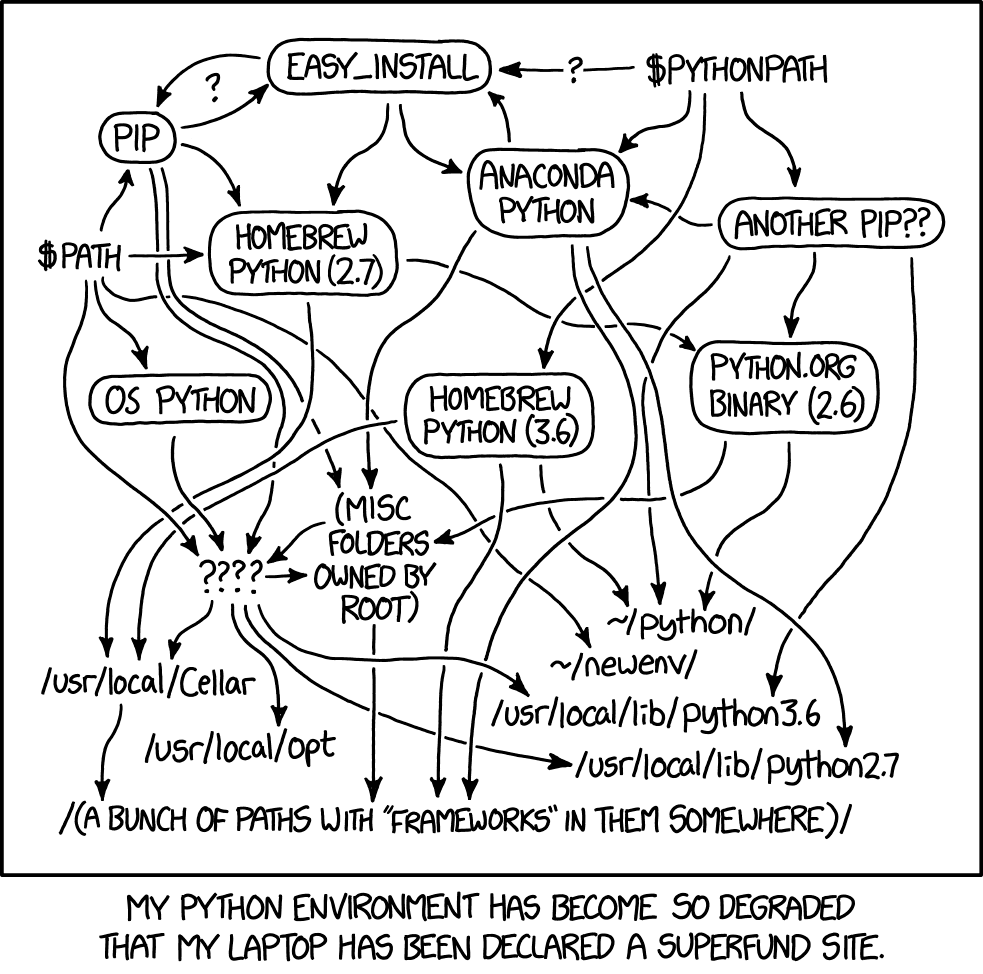
xkcd #1987 by Randall Munroe, used under CC BY-NC 2.5
![]()
Performant - Computational
No-copy access in memory (CPU).
Indexing issues and associated reshape can be avoided with Torch accessor.

Ease of use - Installation
CMake
- Install libtorch (or PyTorch)
- Clone FTorch
- Build using CMake
(instructions provided) - Install
- Link
- Clone and build alongside code
- Guidance on linking provided
Similar to any other lib e.g. NetCDF
Tested on:
- Linux
- macOS
- Windows
CMake is a trademark of Kitware.
Support
- Use frameworks’ implementations directly
- feature support
- future support
- direct translation of python models 1




Licensing and FOSS
The libraries are licensed under MIT and available as FOSS.
- Highly permissive for use by all
- OS development on GitHub using issues and PRs
Saving model to TorchScript
import torch
import torchvision
# Load pre-trained model and put in eval mode
model = torchvision.models.resnet18(weights="IMAGENET1K_V1")
model.eval()
# Create dummmy input
dummy_input = torch.ones(1, 3, 224, 224)
# Trace model and save
traced_model = torch.jit.trace(model, dummy_input)
frozen_model = torch.jit.freeze(traced_model)
frozen_model.save("saved_model.pt")![]()
Loading a Torch model
! Use the FTorch Library
use :: ftorch
implicit none
! Define a Torch module
type(torch_module) :: model
! Load in from Torchscript
model = torch_module_load('/path/to/saved/model.pt')![]()
Creating Tensors
use, intrinsic :: iso_fortran_env, only : sp => real32
! Use the FTorch Library
use :: ftorch
implicit none
! Fortran variables
real(sp), dimension(1,3,244,244), target :: in_data
real(sp), dimension(1, 1000), target :: out_data
integer, parameter :: n_inputs = 1
integer :: in_layout(4) = [1,2,3,4]
integer :: out_layout(2) = [1,2]
! Torch Tensors
type(torch_tensor), dimension(1) :: in_tensor
type(torch_tensor) :: out_tensor
! Populate Fortran data
call random_number(in_data)
! Cast Fortran data to Tensors
! Create input/output tensors from the above arrays
in_tensor(1) = torch_tensor_from_array(in_data, in_layout, torch_kCPU)
out_tensor = torch_tensor_from_array(out_data, out_layout, torch_kCPU)![]()
Running model
![]()
Cleaning up
! Cleanup
call torch_module_delete(model)
call torch_tensor_delete(in_tensor(1))
call torch_tensor_delete(out_tensor)
! Use Fortran array `out_data` elsewhere in code![]()
Complete Code
use, intrinsic :: iso_fortran_env, only : sp => real32
! Use the FTorch Library
use :: ftorch
implicit none
! Define a Torch module
type(torch_module) :: model
! Fortran variables
real(sp), dimension(1,3,244,244), target :: in_data
real(sp), dimension(1, 1000), target :: out_tensor
integer, parameter :: n_inputs = 1
integer :: in_layout(4) = [1,2,3,4]
integer :: out_layout(2) = [1,2]
! Load in from Torchscript
model = torch_module_load('/path/to/saved/model.pt')
! Populate Fortran data
call random_number(in_data)
! Cast Fortran data to Tensors
! Create input/output tensors from the above arrays
in_tensor(1) = torch_tensor_from_array(in_data, in_layout, torch_kCPU)
out_tensor = torch_tensor_from_array(out_data, out_layout, torch_kCPU)
! Infer
call torch_module_forward(model, in_tensor, n_inputs, out_tensor)
! Cleanup
call torch_module_delete(model)
call torch_tensor_delete(in_tensor(1))
call torch_tensor_delete(out_tensor)
! Use Fortran array `out_data` elsewhere in code![]()
GPU Acceleration
Save to TorchScript GPU from python:
# Set device as cuda
device = torch.device('cuda')
# Move model and dummy input to device before saving to TorchScript
model = model.to(device)
model.eval()
dummy_input = dummy_input.to(device)
# Trace model and save
traced_model = torch.jit.trace(model, dummy_input)
frozen_model = torch.jit.freeze(traced_model)
frozen_model.save("saved_gpu_model.pt")![]()
Cast Tensors to GPU in Fortran:
! Load in from Torchscript
model = torch_module_load('/path/to/saved/gpu/model.pt')
! Cast Fortran data to Tensors
in_tensor(1) = torch_tensor_from_array(in_data, in_layout, torch_kCUDA)
out_tensor = torch_tensor_from_array(out_data, out_layout, torch_kCPU)![]()
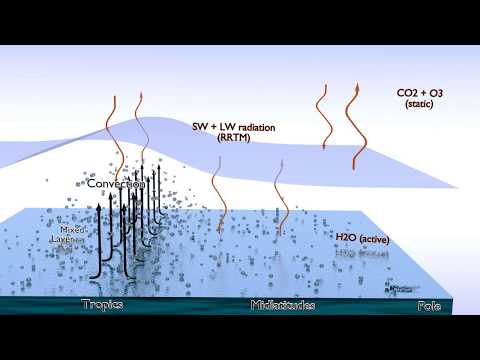
Gravity Wave parameterisation in MiMA
- Atmospheric model (Jucker and Gerber 2017)
- Replace physics-based gravity wave parameterisation
- Neural Net
- Emulating Alexander and Dunkerton (1999) gravity wave parameterisation.
- Fully-connected multi-layer net with identical Pytorch and TensorFlow versions
- Trained offline in PyTorch
- Initially interfaced (slowly) using forpy (Espinosa et al. 2022)
Results



Zonal-mean zonal winds (m/s)
Averaged over ±5 deg lat.
Pressure (height) vs. time Hovmöller diagram
FTorch exactly reproduces results of direct python call
NN is stable and reproduces QBO
Tends to slightly over/under-predict
Strong Scaling
Wilkes3 (CSD3)
- 3rd Generation AMD EPYC 64-Core CPUs
- NVIDIA A100-SXM-80GB GPUs
Observations:
- Data transfer to GPU becomes important
- Suggest using
MPI_gatherto reduce overheads
- Suggest using
- CPU Net scales well

Benchmarking
Following the comparisons and MiMA experiments we performed detailed benchmarking to examine the library performance.




Future work
- Continuous development to improve UX
- Abstraction of C bindings, Torch efficiency etc.
- Implement functionalities beyond inference?
- Online training is likely to become important
- Implementation into CESM and other models
- Including general guidelines

Get involved
- Inform potential users
- Further testing and feedback wanted!
- FTorch team always keen to assist
- Book an ICCS Code Clinic

Thank You
The libraries can be found at:
 Torch: https://github.com/Cambridge-ICCS/FTorch
Torch: https://github.com/Cambridge-ICCS/FTorch
 TensorFlow: https://github.com/Cambridge-ICCS/fortran-tf-lib
TensorFlow: https://github.com/Cambridge-ICCS/fortran-tf-lib
Slides available at: https://jackatkinson.net/slides/IPSL_FTorch/IPSL_FTorch.html
Get in touch:
The ICCS is funded by ![]()
![]()
Bonus Content ![]()

e.g. Loading a Torch model
