FTorch
Facilitating Hybrid Modelling

Senior Research Software Engineer
ICCS - University of Cambridge
2025-07-18
Precursors
Slides and Materials
To access links or follow on your own device these slides can be found at:
jackatkinson.net/slides
Licensing
Except where otherwise noted, these presentation materials are licensed under the Creative Commons Attribution-NonCommercial 4.0 International (CC BY-NC 4.0) License.

Vectors and icons by SVG Repo under CC0(1.0) or FontAwesome under SIL OFL 1.1
Weather and Climate Models
Large, complex, many-part systems.

Parameteristion
Subgrid processes are largest source of uncertainty

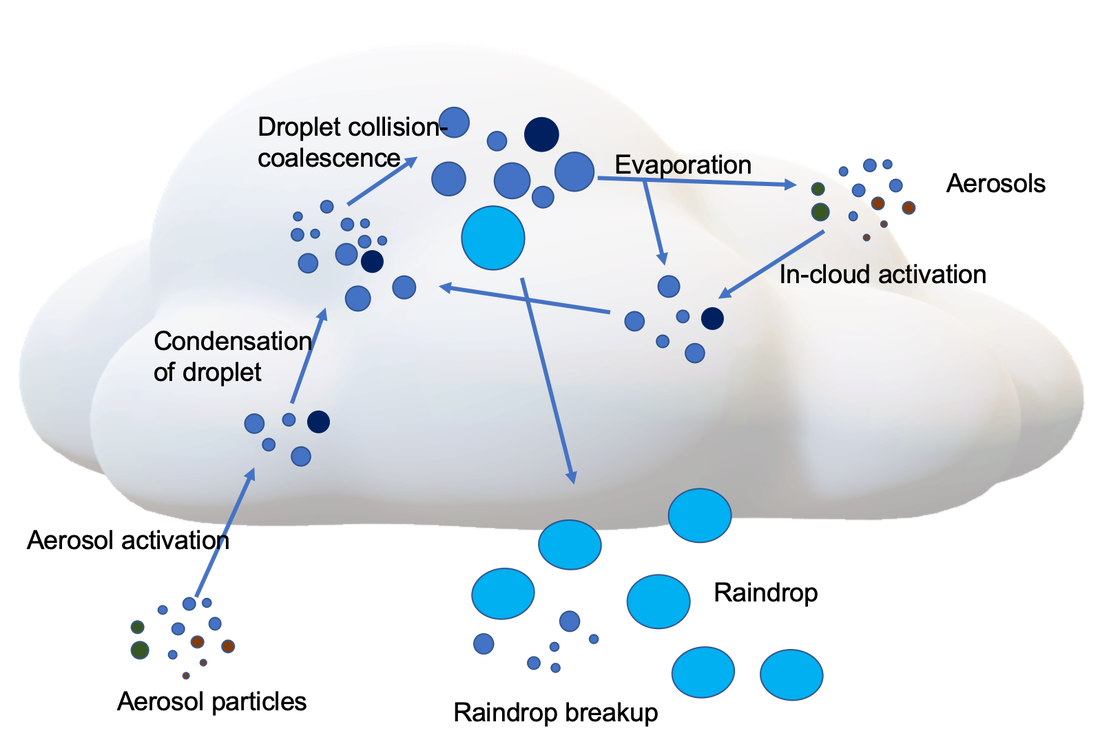
Microphysics by Sisi Chen Public Domain
Staggered grid by NOAA under Public Domain
Globe grid with box by Caltech under Fair use
Parameteristion
Subgrid processes are largest source of uncertainty
Microphysics by Sisi Chen Public Domain
Staggered grid by NOAA under Public Domain
Globe grid with box by Caltech under Fair use
Machine Learning in Science
We typically think of Deep Learning as an end-to-end process;
a black box with an input and an output1.

 Who’s that Pokémon?
Who’s that Pokémon?
\[\begin{bmatrix}\vdots\\a_{23}\\a_{24}\\a_{25}\\a_{26}\\a_{27}\\\vdots\\\end{bmatrix}=\begin{bmatrix}\vdots\\0\\0\\1\\0\\0\\\vdots\\\end{bmatrix}\] It’s Pikachu!
Neural Net by 3Blue1Brown under fair dealing.
Pikachu © The Pokemon Company, used under fair dealing.
Hybrid Modelling
Neural Net by 3Blue1Brown under fair dealing.
Pikachu © The Pokemon Company, used under fair dealing.
Language interoperation
Many large scientific models are written in Fortran (or C, or C++).
Much machine learning is conducted in Python.

![]()
![]()

![]()
![]()
![]()

![]()

Mathematical Bridge by cmglee used under CC BY-SA 3.0
PyTorch, the PyTorch logo and any related marks are trademarks of The Linux Foundation.”
TensorFlow, the TensorFlow logo and any related marks are trademarks of Google Inc.
Efficiency
We consider 2 types:
Computational


![]()

Developer



In research both have an effect on ‘time-to-science’.
Especially when extensive research software support is unavailable.
Approach
![]()
![]()
![]()
![]()

![]()
Python
env
Python
runtime
![]()
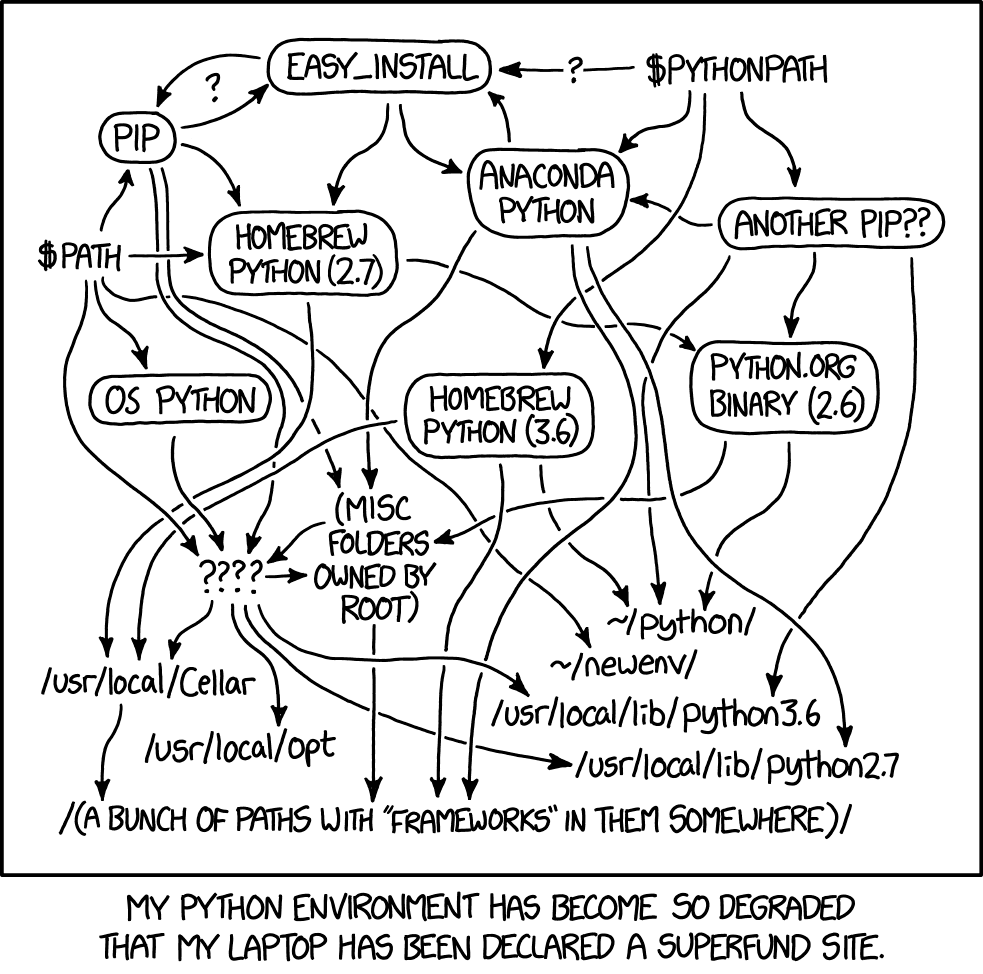
xkcd #1987 by Randall Munroe, used under CC BY-NC 2.5
![]()
Highlights - Computation
- Indexing issues and associated reshape1 avoided with Torch strided accessor.
- No-copy access in memory (on CPU).

Find it on :
Model - Saving from Python
import torch
import torchvision
# Load pre-trained model and put in eval mode
model = torchvision.models.resnet18(weights="IMAGENET1K_V1")
model.eval()
# Create dummmy input
dummy_input = torch.ones(1, 3, 224, 224)
# Save to TorchScript
if trace:
ts_model = torch.jit.trace(model, dummy_input)
elif script:
ts_model = torch.jit.script(model)
frozen_model = torch.jit.freeze(ts_model)
frozen_model.save("/path/to/saved_model.pt")![]()
TorchScript
- Statically typed subset of Python
- Read by the Torch C++ interface (or any Torch API)
- Produces intermediate representation/graph of NN, including weights and biases
tracefor simple models,scriptmore generally
Fortran
use ftorch
implicit none
real, dimension(5), target :: in_data, out_data ! Fortran data structures
type(torch_tensor), dimension(1) :: input_tensors, output_tensors ! Set up Torch data structures
type(torch_model) :: torch_net
integer, dimension(1) :: tensor_layout = [1]
in_data = ... ! Prepare data in Fortran
! Create Torch input/output tensors from the Fortran arrays
call torch_tensor_from_array(input_tensors(1), in_data, torch_kCPU)
call torch_tensor_from_array(output_tensors(1), out_data, torch_kCPU)
call torch_model_load(torch_net, 'path/to/saved/model.pt', torch_kCPU) ! Load ML model
call torch_model_forward(torch_net, input_tensors, output_tensors) ! Infer
call further_code(out_data) ! Use output data in Fortran immediately
! Cleanup
call torch_delete(model)
call torch_delete(in_tensors)
call torch_delete(out_tensor)![]()
GPU Acceleration
Cast Tensors to GPU in Fortran:
! Load in from Torchscript
call torch_model_load(torch_net, 'path/to/saved/model.pt', torch_kCUDA, device_index=0)
! Cast Fortran data to Tensors
call torch_tensor_from_array(in_tensor(1), in_data, torch_kCUDA, device_index=0)
call torch_tensor_from_array(out_tensor(1), out_data, torch_kCPU)![]()
FTorch supports NVIDIA CUDA, ARM HIP, Intel XPU, and AppleSilicon MPS hardwares.
Use of multiple devices supported.
Effective HPC simulation requires MPI_Gather() for efficient data transfer.
Publication & tutorials
FTorch is published in JOSS!
Atkinson et al. (2025)
FTorch: a library for coupling PyTorch models to Fortran.
Journal of Open Source Software, 10(107), 7602,
doi.org/10.21105/joss.07602
Please cite if you use FTorch!
![]()
In addition to the comprehensive examples in the FTorch repository we provide an online workshop at /Cambridge-ICCS/FTorch-workshop
ICON
- Icosahedral Nonhydrostatic Weather and Climate Model
- Developed by DKRZ (Deutsches Klimarechenzentrum)
- Used by the DWD and Meteo-Swiss
- Interpretable multiscale Machine Learning-Based Parameterizations of Convection for ICON (Heuer et al. 2023)1
- Train U-Net convection scheme on high-res simulation
- Deploy in ICON via FTorch coupling
- Evaluate physical realism (causality) using SHAP values
- Online stability improved when non-causal relations are eliminated from the net

![]()
CESM coupling
- The Community Earth System Model
- Part of CMIP (Coupled Model Intercomparison Project)
- Make it easy for users
- FTorch integrated into the build system (CIME)
libtorchis included on the software stack on Derecho- Improves reproducibility

Derecho by NCAR
Putting it together - running an optimiser in FTorch

In both cases we achieve \(\mathbf{f}(\mathbf{x};\mathbf{a})=\begin{bmatrix}1,2,3,4\end{bmatrix}^T\).
Thanks for Listening
Get in touch:
Find it on :
Thanks to Joe Wallwork, Tom Metlzer, Elliott Kasoar
and the rest of the FTorch team.
FTorch has been supported by ![]()
The ICCS received support from 
![]()
